-
北斗系统在自动驾驶动态高精地图领域的技术与行业应用
Link
Yilin Huang, Degang Yang, Shuai Yang, Guoxing Che
中国卫星导航与位置服务大会, 2019
-
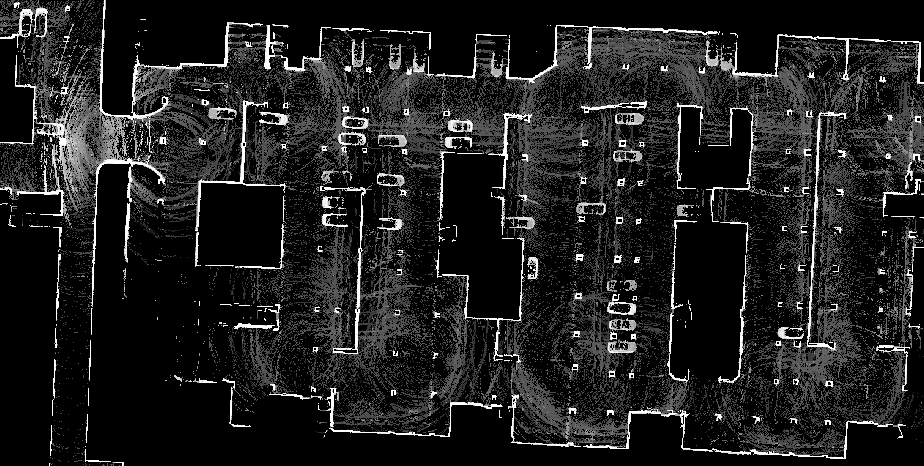
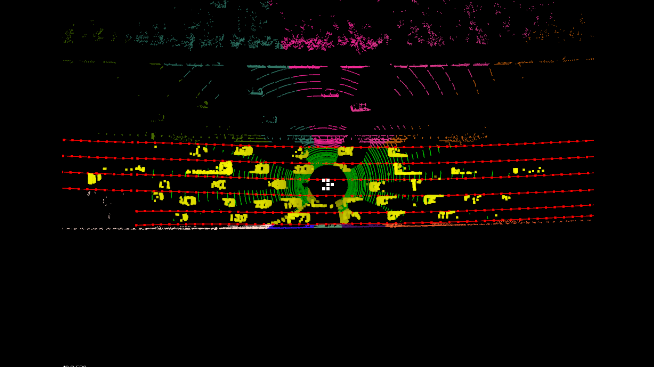
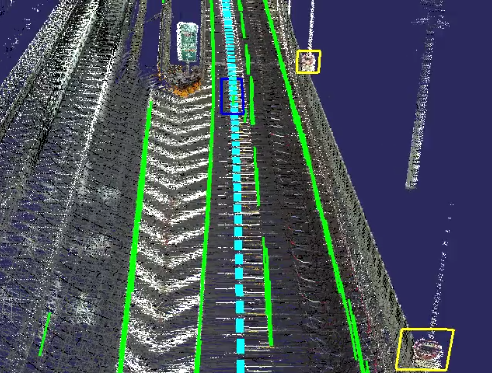
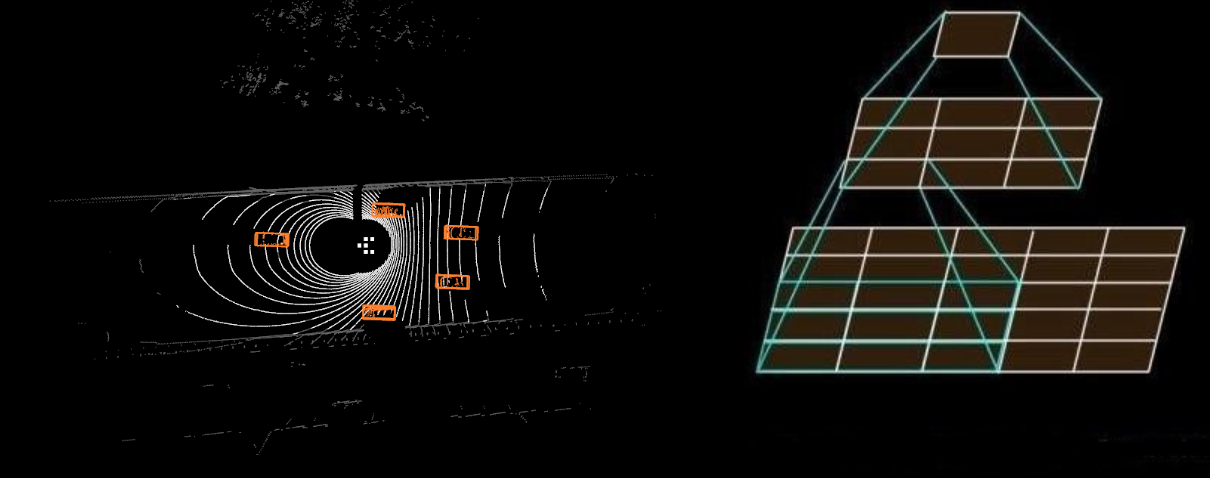
Fully Convolutional Networks Vehicle Detection in Point Cloud
Degang Yang, Xiaohui Li, Yifeng Pan
The earliest practice, 2016
-
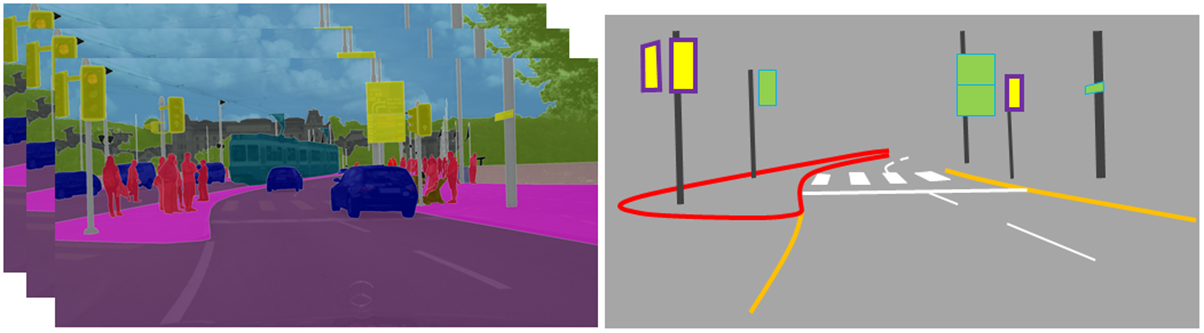
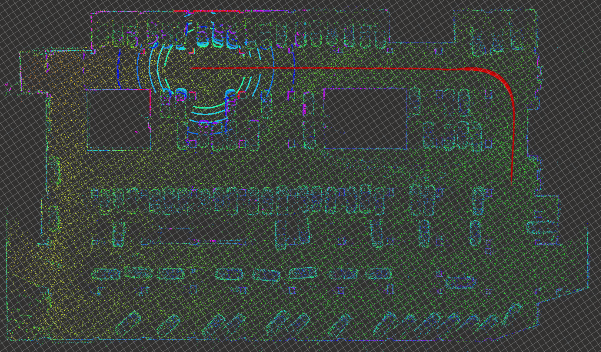
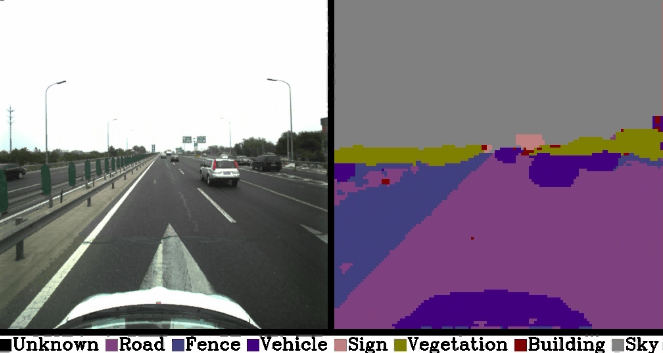
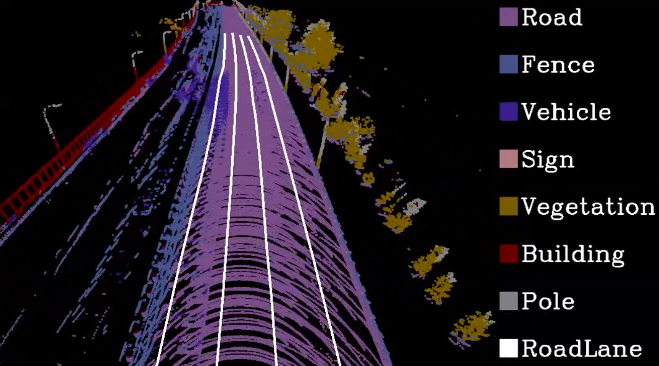
Fully Convolutional Networks Semantic Segmentation for Autonomous Driving
Degang Yang, Yifeng Pan, Chang huang
The earliest practice, 2015
-
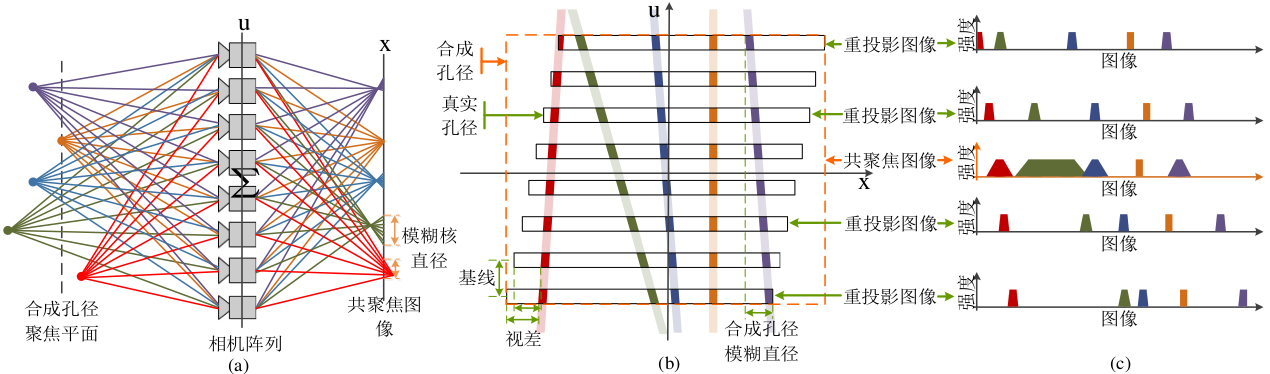
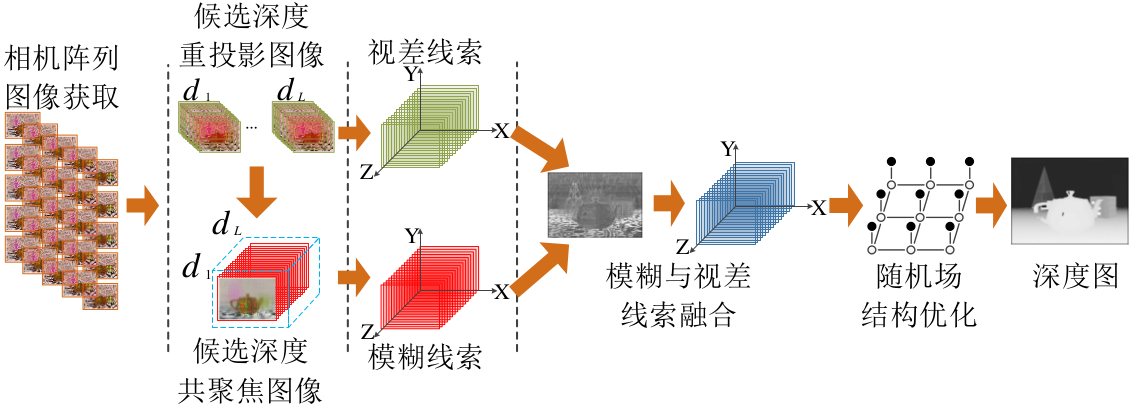
Depth Estimation from Light Field Analysis Based Multiple Cues Fusion
PDF
Degang Yang, Zhaolin Xiao, Heng Yang and Qing Wang
Chinese Journal of Computers, 2015
-
Research on Depth Estimation by Light Field Multiple Cues Fusion
Degang Yang and Qing Wang
Master Thesis, 2014
Camera Array, Light Field Analysis, Multiple Depth Cues Fusion, Depth Estimation, Structured Inference
-
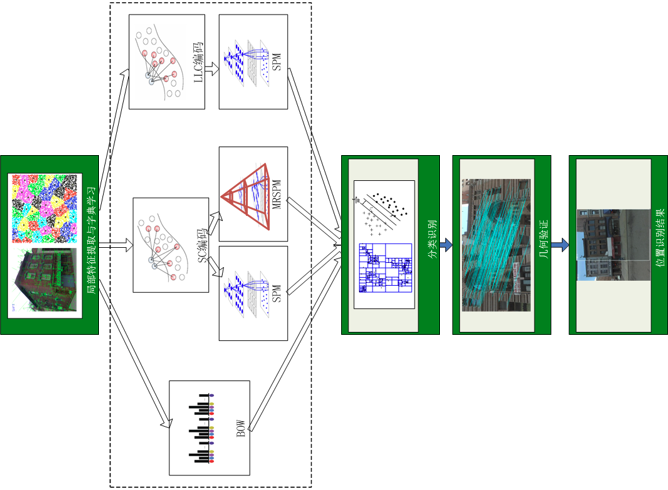
Location Recognition based on Landmark Images
Degang Yang and Qing Wang
Bachelor Thesis, 2011
Location Recognition, Image Retrieval, Image Feature, Sparse Coding, Spatial Pyramid, Geometry Verification
-
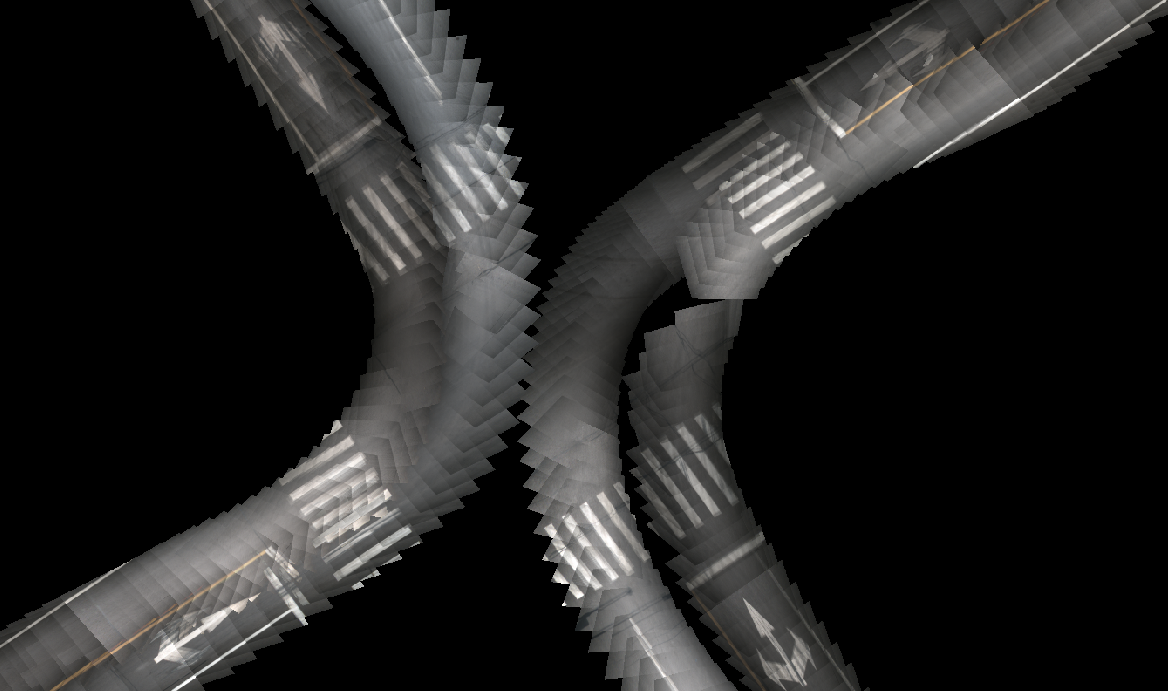
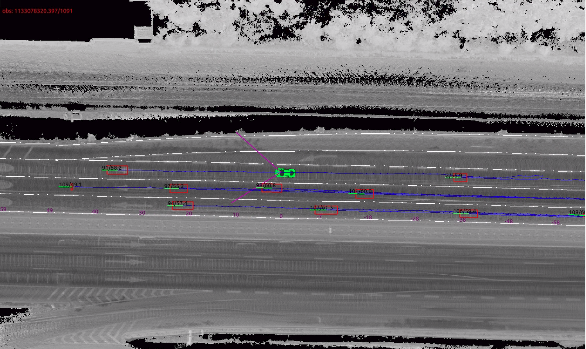
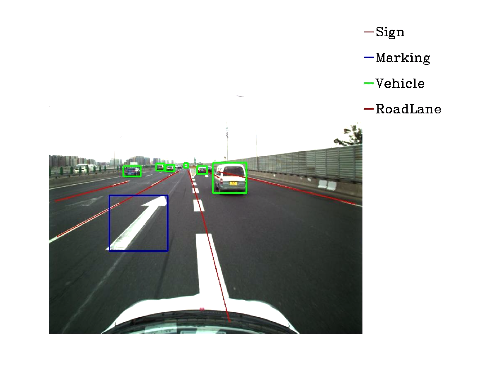
高精语义定位系统
Degang Yang
专利, 2017
Localization from semantic entity matching
-
实时动态高精语义建图系统
Degang Yang
专利, 2017
Automatic semantic mapping for autonomous driving
-
位姿信息估计方法、装置和可移动设备
Degang Yang
专利, CN106780608A, 2016
Deep Learning method for odometry and mapping
-
用于机器的人机交互学习方法及机器
Degang Yang, Jianwei Niu, Dalong Du and Lixin Cao
专利, CN106125911A, 2016
Learning based human-machine intercation
-
StereoDSO
Jiatian WU, Degang YANG, Qinrui YAN, Shixin LI
Code